简介
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 1")
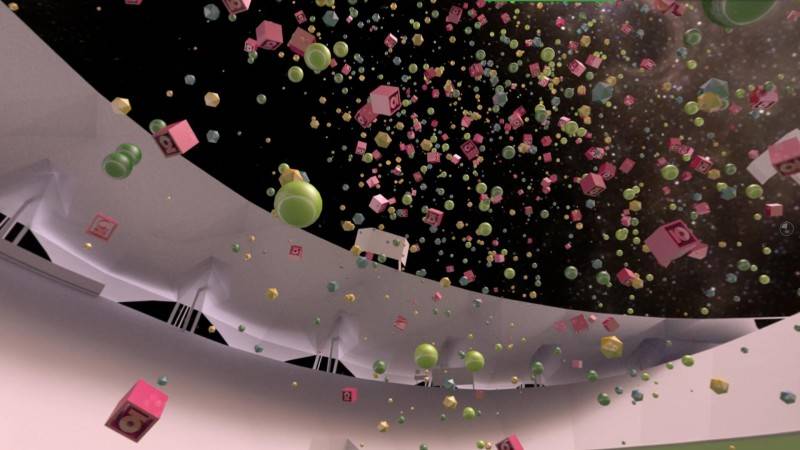
这是一个通用的 VR 摄影机操作。它使用特定的 360° 投影按照一定的距离偏移两个摄影机。它的主要优点包括:
它可以与能够在脱机渲染器中渲染的,任何场景组件(网格、头发、粒子、体积和复杂着色节点)一起使用。
你可以轻松创建 VR 内容。只需将 VR 摄影机添加到现有项目。
重现内容所需的必备硬件要求适中。可以通过任何借助于所需的投影,重现视频的平台来体验生成的内容。
内容便于作为视频文件或通过视频流分发。它可以使用专用软件、应用程序或者使用 Web 标准(如 WebGL、WebVR)重现。它还可以与 Google 和 Facebook 360 3D 视频一起使用。
限制
极点:默认情况下,极点将会出现非常明显的瑕疵。这要求您调整每个场景的立体效果,并在极点附近进行平滑处理,从而减弱立体效果。
倾斜:由于立体效果的实现方式,倾斜头部将破坏立体感知。
视差:当您沿任意轴移动头部时,会出现脱机 VR 场景无法处理的视点变化。这会减弱沉浸式体验,因为我们只能对头部旋转做出反应。
摄影机标签上提供了有关公用摄影机参数的更多详细信息。附加属性如下所述:
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 2")
使用 vr_camera 时,建议在 Arnold 的“渲染设置”(Render Settings)中启用“锁定采样图案”(Lock Sampling Pattern)。这样可以避免采样图案从一帧变到另一帧,从而防止在 VR 中分散注意力。
模式(Mode)
有四种模式选项可用,因此可以获得能够更好地适应您的流程的结果。选项如下:
并列(Side by Side)
上下(Over Under)
左眼(Left Eye)
右眼(Right Eye)
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 3")
堆叠式眼睛格式和立方体贴图格式有时可能会在最终沉浸式图像中产生接缝。要避免这些接缝,请执行以下操作:
使用 1x1 长方体过滤器(这种方法很有效,因为当立方体贴图扭曲显示时,系统会应用更柔和的附加过滤器)。
使用每个方向上的堆叠面数的倍数作为分辨率。例如,对于两只眼睛以层叠方式分布的 3X2 立方体贴图,垂直分辨率应为 4 的倍数,水平分辨率则应为 3 的倍数。
投影(Projection)
根据选定的投影和选项,每个采样都对应于一个光线方向,以便完全涵盖摄影机周围的所有空间。在纬度-经度、立方体贴图 (6x1)、立方体贴图 (3x2) 之间进行选择。
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 4")
3×2 立方体贴图具有更好的图像宽高比。
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 5")
视角分离(Eye Separation)
定义为了实现立体效果所必需的、右侧摄影机和左侧摄影机之间的分离。每个采样的摄影机原点位置将更新,而且将沿着垂直于光线的方向从中心置换。相比于使用两个物理摄影机,在采样级别(而非逐像素)执行此操作会产生更好的结果。下面的图片对此进行了说明:
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 6")
眼到颈部(Eye to Neck)
从颈部到眼睛的水平距离。
顶部合并模式(Top Merge Mode)
这些参数定义天空的合并函数。通常,余弦函数 (CoS) 将更平滑而且不容易出现瑕疵。在“无”(None)、“余弦”(Cosine)和“着色器”(Shader)之间进行选择。
顶部合并角度(Top Merge Angle)
以度为单位定义合并开始在天空上生效的角度。与极点之间的角度(0Ɔ 顶部或 180Ɔ 底部)越小,您在它下面看到的立体效果越明显,但在极点处出现瑕疵的可能性最大。
在下面您可以使用 cos 合并函数看到与起始顶部角之差(范围为 0 到 80):
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 7")
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 8")
底部合并模式(Bottom Merge Mode)
这些参数定义地面的合并函数。通常,余弦函数 (CoS) 将更平滑而且不容易出现瑕疵。在“无”(None)、“余弦”(Cosine)和“着色器”(Shader)之间进行选择。
底部合并角度(Bottom Merge Angle)
以度为单位定义合并开始在地面上生效的角度。与极点之间的角度(底部 0Ɔ 或顶部 180Ɔ)越小,您在它下面看到的立体效果越明显,但在极点处出现瑕疵的可能性最大。
如果 bottom_merge_angle 高于 top_merge_angle,它将被区间限定到 top_merge_angle。
合并着色器(Merge Shader)
当 merge_mode 设置为“shader”时使用。它可用于改善对极点进行平滑处理的控制。例如,如果必须将 3D 与摄影机中具有非常具体的极点合并的现实生活镜头集成。如果没有“合并着色器”(Merge Shader),将仅具有通用极点合并。着色器中的黑色完全不会产生合并,白色将产生完全合并。
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 9")
工作流
极点合并
虽然此方法可以为查看者周围的对象创建非常好的 3D 效果,但顶部极点和底部极点处会出现一些令人讨厌的瑕疵。这是因为摄影机偏移导致光线无法到达顶部和底部位置,如下所示:
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 10")
下面是极点在这种情况下的显示效果示例:
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 11")
我们可以通过平滑光线射向上方或下方时的摄影机置换来解决这些瑕疵。此解决方案将会消除极点的立体效果,但实际上不是很明显。在这种情况下,摄影机光线类似如下:
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 12")
极点合并将会生成类似如下的结果:
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 13")
提供了不同的设置来控制此极点合并,因此可以根据场景对其进行调整。首先,顶部极点参数和底部极点参数是独立的,因为它们在场景中可能会有不同的先决条件。例如,地板上的极点合并可能需要非常平滑(如果有许多细节),但顶部合并可能会比较毛糙(如果是纯色),从而在上半球上实现更贴切的立体效果。顶部的毛糙合并类似如下:
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 14")
极点合并工作流
为了在场景中实现最佳的立体效果,同时避免出现极点瑕疵,可以单独调整顶部极点和底部极点,以更好地适合场景的具体细节。
极点处的瑕疵有两种不同的类型:
扭曲瑕疵:
用一只眼看单个图像时,极点处有一些变形。垂线不在 90 度方向上。往往会在增加合并角度时出现这些瑕疵。部分示例:
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 15")
立体效果瑕疵:
用一只眼看单个图像时,您可能会注意到不同的扭曲,但当您左右两眼同时看图像时,会注意到极点上有环形波。下面提供一个示例:
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 16")
示例工作流:Mery 视频
此视频的制作非常简单。下面是它的创建步骤:
添加一个普通 VR 摄影机并为其调整正确的参数。
安排场景以便您在任何方向都可以查看。在窗户后面,添加了一些图像来模拟室外以及一对柱子来隐藏一些未显示在原始场景摄影机中的照明瑕疵。
渲染了包含制作字幕的一帧并在 Nuke 中将其添加回最终视频。
阿诺德渲染教程(112):VR虚拟摄像机(VR Camera) - R站|学习使我快乐! - 17")


精讲班 第一季 ~ 中文视频教程 超值特惠中...")
 精讲班 第二季~ Hardsurface Modeling 中文视频教程 超值预售中…")

阿诺德真实材质渲染宝典》高端视频教程(含工程) Developing Realistic shaders in Arnold for Cinema 4D 强烈推荐")
 CG&VFX 必修课 (不断更新ing...)")
 不断更新ing")
 运动图形高端操作 视频教程 不断更新ing")
 持续更新ing")
 进阶成为大神之路 视频教程")
 进阶成为大神之路 视频解析 视频教程")
 超值特惠")
 超值预售~")

很棒的分享!
喜欢这个工作流程